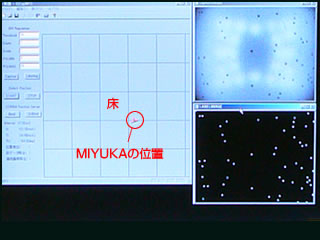
当社は、建物内を移動するロボットが自分の位置を瞬時に、かつ高精度に見つけ出すシステム「MIYUKA(ミユカ)」を東京理科大学の協力で開発しました。
介護や補助、警備、搬送など、未来の建物空間ではさまざまなサービス分野におけるロボットの活躍が期待されています。これらのロボットが本格的に普及するには、建物内でのロボットの位置を安定的に検出する技術が不可欠です。
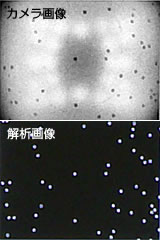
本システムは、床面にランダムに描かれた黒点のパターンをカメラで読み取り、データベースと照合して現在位置を特定するもので、人工衛星が恒星の位置と星図を照合して機体の向きを特定する姿勢計測技術を応用しています。今後は、ロボットの軌道が拘束されない経路計画やレイアウト変更にも柔軟に対応できる工場内の自動搬送ロボットの実用化を目指します。
■床位置検出システム「MIYUKA」の特長
|
||
0.1秒以内で現在位置を検出。人並みの速度で目的地へ移動
「MIYUKA」は、9cm角あたり15~35個(平均25個程度)の黒点をランダムにつけた床と、そのパターンを瞬時に読み取って位置を検出する装置部から構成されています。
装置部は、産業用カメラと照明用のLED(発光ダイオード)、撮影画像中の黒点の位置関係をデータベースと照合して位置を算出する計算機で構成されており、データベースには任意の黒点から半径約13cm以内にある黒点の位置関係がすべて入力されています。
本システムを搭載したロボットは、真下の床をLEDで照らしながら産業用カメラで毎秒15~20カット撮影するとともに、写真に含まれる黒点の位置関係をデータベースと照合し、現在の 位置や向きを検出します。検出時間は0.1秒以内で、位置精度は0.5mm以下、方向精度は1度以下です。また、位置検出が可能なロボットの移動速度は4km/hであり、人の歩行速度程度で目的地へ移動することができます。

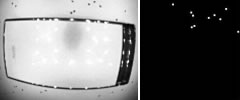
装置部を搭載した実験用ロボット
点の消失やゴミ等による点の増加にも強い位置検出システム
本システムは、点が消失してしまったり、ゴミなどが混入したために点が増加してしまった場合でも、高精度に位置を検出することができます。
点の消失
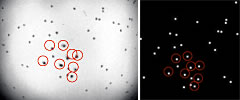
ゴミの混入による点の増加
■開発者の一言

技術研究所
深瀬主任研究員
ある大学の研究室で目にしたスターセンサーという技術から本開発を発想しました。スターセンサーは人工衛星搭載のカメラから宇宙空間を撮像し、そこに映った星群の配置を星図の中から探すことで人工衛星の向きを推定します。床に散りばめた点群を星群に見立ててスターセンサーの技術を適用したのですが、当初はまったく上手くいきませんでした。星群とは異なり床点群間には微妙な位置誤差が発生することと探索対象の床点群データベースの多さが原因でした。これを独自のアルゴリズムにより克服し、ゴミ点の混入や点の消失に強いスターセンサー技術の特長を生かすことで、信頼性が高い位置検出を実現しました。
“ミユカ”という名称には床をみて自分の位置を特定するという意味とは別に、未来の床の意味も込められています。実用化のためにはクリアすべき課題がいくつかありますが、まだ見ぬ未来の建物を夢見て開発を進めています。