当社は、現場の省人化・生産性向上のための技術として、重量鉄筋の配筋作業を支援するアーム型ロボット「配筋アシストロボ」を開発※しました。
近年、高速道路やトンネルなどの土木建設現場では、耐震性向上や工期短縮を目的に、鉄筋を長く、太くする傾向にあり、重量も増加しています。こうした重量鉄筋を定められた位置に運び、並べる作業(配筋作業)は作業者の負担が大きく、高齢化による熟練工の不足も危惧されています。
当社が開発した「配筋アシストロボ」は、人間の右腕の機能をスケールアップさせたパワーアシストロボットです。作業者の意思に合わせて滑らかに動き、これまで6〜7人がかりで行っていた、200kgを超える鉄筋の配筋作業を約半分の3人で行うことが可能です。
今後、当社の土木建設現場内で、操作性や効率性の実証実験を重ね、実工事への展開を目指します。
アクティブリンク株式会社、株式会社エスシー・マシーナリと共同開発

インデックス
「配筋アシストロボ」の概要
本ロボットは人間の右腕の機能を拡張したロボットで、肩、上腕、肘、下腕、手に相当する5つのパーツと、動きをアシストするモーター、制御盤で構成されています。 作業の際には、人間の肩にあたる「肩旋回部」を配置場所近くの鉄骨柱に固定し、手に当たる「把持部」で鉄筋を掴んで運搬します。全長および作業半径は約5m、上下方向には約2m動かすことができ、最大で250kgの重量鉄筋を配筋することができます。
また、ロボットはパーツごとに分解することができます。これにより、配筋作業の進行に合わせてロボットの設置場所を変える際、作業者3人の手によって20分程度で分解、再組み立てが可能です。
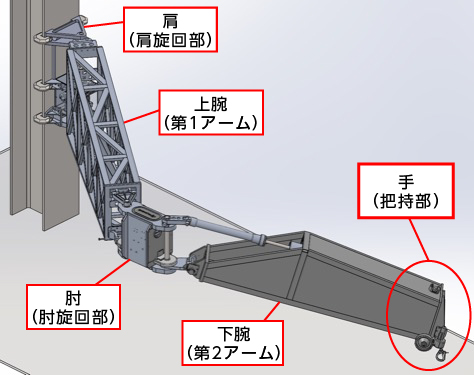
肩旋回部、肘旋回部、第2アームにモーターが組み込まれており、なめらかな動きを実現している。
簡単な操作で配筋作業をアシスト
ロボットを用いた作業は、操作者1名と、鉄筋の両端を支えて位置合わせをする2名の計3名で行います。 操作は熟練工でなくとも簡単に行うことができます。
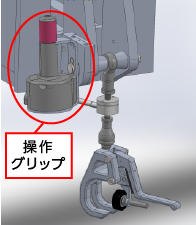
鉄筋の上げ下げは、アーム先端の把持部にある昇降ボタンで行い、水平移動は、操作グリップを片手で握り、アームを動かしたい方向に倒しながら進むという簡単な動きで行えます。操作者がグリップを押す力の向きと大きさに合わせてモーターが稼働し、動作を助けてくれるので、容易に鉄筋を配筋でき、作業の効率化が図れます。
作業手順

鉄筋を把持部にしっかり掴ませ、
昇降ボタンを押して吊り上げる
操作グリップを動かしたい方向に倒し、
鉄筋を移動させる

配置場所まで移動させたあと、
両端を支える2人が鉄筋の位置を合わせる
再び昇降ボタンを押し、
合わせた位置に鉄筋を吊り下ろす