当社は、「ロボット対応型」施設の実現に向け、様々なロボットを統合制御する技術を開発しました。現在、エレベータ等の建物設備と連携する複数種類のサービスロボットを技術研究所本館(東京都江東区)に試験導入しています。
これまでは、各ロボットメーカーがそれぞれロボットの運行管理システムを独自に開発していたため、サービス事業者が様々なロボットを建物内に導入して、これらの運行管理システム同士を連携させ、ロボットに自由に建物内を動き回らせるような複合的なサービスを提供することは困難でした。本技術では、これまで研究開発を進めてきた施設・街区内における自動運転プラットフォームを活用し、既開発の高精度3次元デジタルマップや建物設備情報と連動させることで、異なる運行管理システムを連携させるとともに、ロボット同士の協調動作を可能とし、多様なロボットが建物内の階をまたいで自由に動き回り、多様なサービスを提供できるようになります。
当社では順次、本技術の対象となる建物設備やサービスロボットの種類を拡大し、使い勝手良く、安全なサービスとして、建物の高付加価値化を目指します。

インデックス
統合制御技術の概要
ロボットが注目される背景と建物内での活用における課題
サービスロボットは人手不足解消への対応だけでなく、新型コロナウイルス対策としての「非接触型サービス」に位置づけられ、注目を集めている技術分野です。代表的なサービスロボットとして、警備ロボット、清掃ロボット、案内ロボット、物流ロボットなどが挙げられます。これらは単一のサービスを提供するために、決められたタスクを行うことができますが、複数のロボットが同時に動き回る施設では、ロボット同士が互いの動作の障害となり得るため、ロボットの運行管理を行う上で、優先順位付けや動作範囲の調整などが必要になることは容易に想像できます。また、ロボットが建物内を自由に行き来するためには、自動ドアやエレベータなどの移動経路上の建物設備と連動することも必須となります。
例えば、4Fにいる案内ロボットが1Fの来客を迎えに行く場合では、経路上で動き回る警備ロボットや清掃ロボットをかわしつつ、同時にエレベータを利用しようとしている人間や物流ロボットに合わせて順番待ちをする必要があります。
自動運転プラットフォームの概要と共通APIの開発
ロボットは自身が搭載したセンサーを用いて、周辺の環境をセンシングして自己位置や周囲の状況を認知した上で、システムが次の動作を判断し、自身のアクチュエータを機械制御することで自律的に移動を行うことが基本です。しかしながら、建物・施設・街区においては、歩行者や障害物が混在し、前述のように走行経路上にドアやエレベータ等の建物設備が存在するなど、現実の環境はあまりに複雑で,自身が搭載した限られたセンサーのみではスムーズに走行することが難しい場合も想定されます。
このような環境下で、安全かつ円滑なロボットの自律移動を実現するためには、ロボット側が周辺環境を認識することはもちろんですが、施設側からもロボットの移動をサポートするとともに、それらを統合管理し全体最適化するプラットフォームが必要となります。なお、ロボットと自動運転車はセンサーで周囲を認識して自律移動するという意味で同等の技術が用いられていること、施設側と統合管理するという意味でも同列に扱うことができることから、当社ではこれを自動運転プラットフォームと呼び、以下の3つの技術要素の研究開発を進めています。
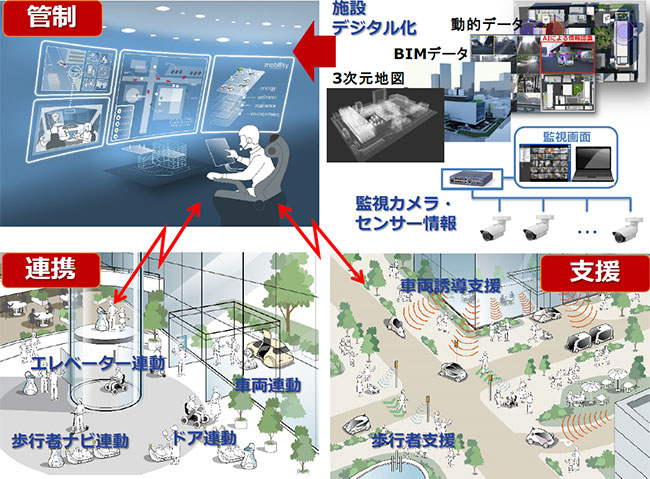
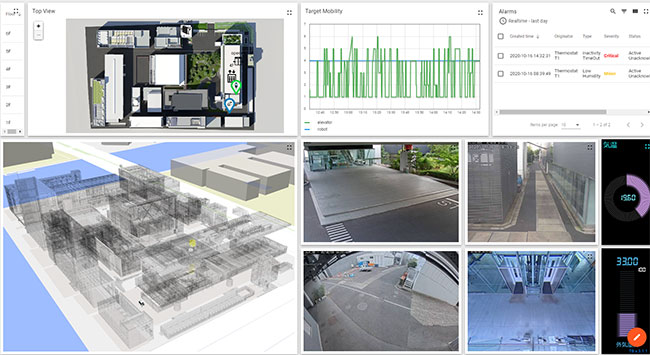
(1)施設と車両・ロボットの管制技術施設の運用管理の一環として、複数の車両・ロボット、施設側の設備の状態、さらには施設内に設置したセンサー情報などをリアルタイムで収集してBIM上に一元管理し、車両・ロボットの運用を効率化・最適化する技術。
(2)施設と車両・ロボットの連携技術車両・ロボットと建物設備(例えばエレベータ、自動ドア、シャッターなど)、さらには歩行者用ナビゲーションシステムとの連動を行い、建物内外の移動のシームレス性を向上させる技術。
(3)車両・ロボットの移動支援技術車両・ロボットへの高精度3次元地図の提供、建物内の監視カメラとAI画像認識技術により走行経路上の障害物や他の車両・ロボットを認識し提供することにより、安全かつ円滑な車両・ロボットの走行を支援する技術。
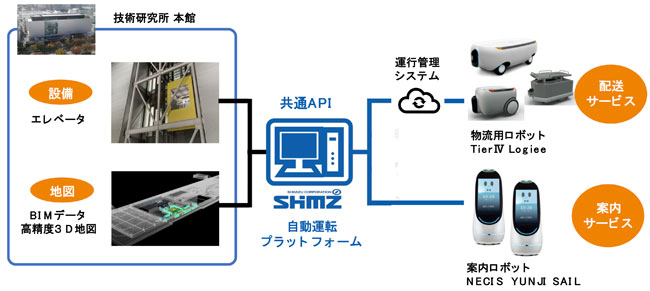
今回新たに開発・実装したのは、建物設備と複数の異なるロボットとを連携させるための共通APIです。共通APIがロボットの運行管理ソフトウェア、高精度3次元デジタルマップ、自動運転管制システム、エレベータ制御システムなどを繋ぎ、異なる種類のロボットや建物設備との協調動作を可能にしました。共通APIによって、ロボットメーカー側が建物設備の仕様に配慮する必要なく、建物へのサービスロボット導入が容易になるとともに、その能力を最大限に発揮させることができるようになります。
BIM点群地図の開発
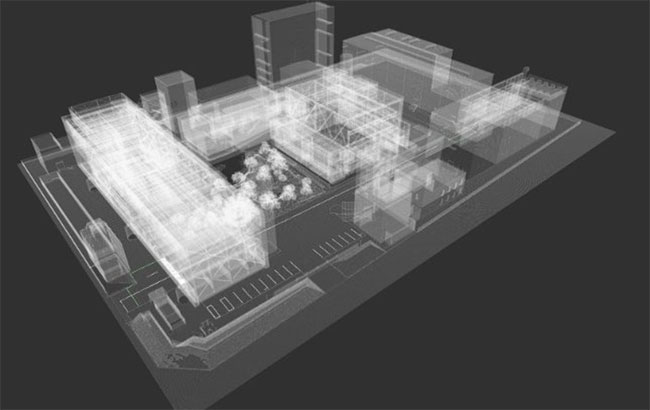
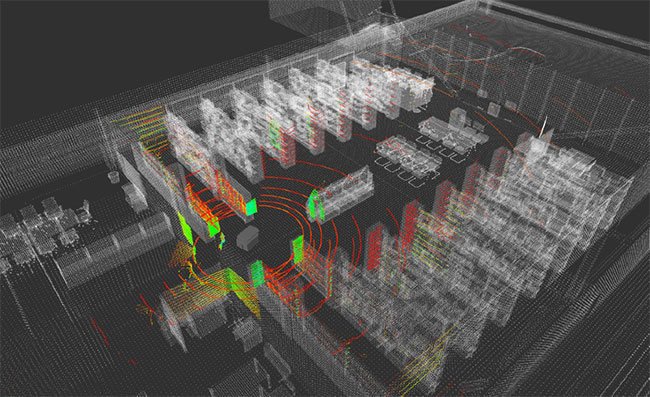
ロボットの自律移動や管理に使われる地図データは、個別のロボットメーカーが独自にレーザーセンサなどで計測・作成することが一般的です。そのため、異なるメーカーのロボットや建物設備と連携させるためには、それぞれの地図を統合し位置合わせを行うなどの複雑な作業が必要です。そこで当社では、建物データを活用することによる、より高精度で詳細かつ、様々なロボットの自律移動や管理に共通に使うことができる地図データの生成技術を開発しました。
建物データは、いわゆるBIM(Building Information Modeling)と呼ばれ、壁や柱、建具、カーテン、植栽などの各パーツの形状や設備・属性情報を内包したものになります。このBIMデータと高度な数値解析技術をあわせることによって、高精度3次元デジタルマップの自動生成を実現しました。これにより、地図を利用したロボットは方向を含めた自己位置を、より正確に把握することができます。また、複数種類のロボットや建物設備で同一の地図上の情報を共有することで、ロボット同士の状態や建物設備情報および障害などを正確に把握できるようになりました。これにより、人間とロボット双方にとって、より一層安全・安心な走行、さらにきめ細やかなサービスの提供が可能となることが期待されます。
技術研究所での試験導入状況
技術研究所本館での試験導入では、用途の異なる2機種のサービスロボットとエレベータと共通APIを通して自動運転プラットフォームでつなぎ、フロアをまたいだ連携動作の実験を行いました。採用したのは、利用者のリクエストに応えて書籍などを運ぶ (株)ティアフォー社※製の物流用ロボット「Logiee(ロージー)」と、来館者を目的場所まで案内するNECネッツエスアイ(株)が提供する案内ロボット「YUNJI SAIL(ユンジ セイル)」です。
(株)ティアフォー社は自動運転プラットフォームの共同研究先

物流用ロボット「Logiee(ロージー)」 
案内ロボット「YUNJI SAIL(ユンジ セイル)」
実験手順
(1)案内ロボットは2階の待機場所、物流用ロボットは6階の図書室に配置。
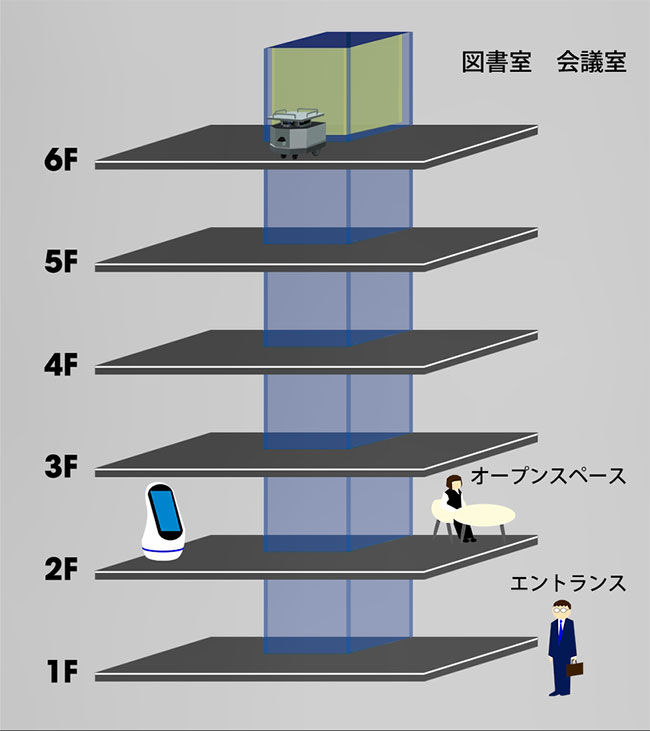
(2)案内ロボットはエレベータで階下へ移動。エントランスで来館者を出迎え、エレベータを使い案内先の6階会議室に向かう。

(3)一方、物流用ロボットは、所員による本の取り寄せリクエストに応じ、目的の本がある書棚まで移動。図書室員が当該の本を載せた後、6階のエレベータホールへ自律移動。

(4)6階の廊下では、来館者を伴った案内ロボットと物流用ロボットが鉢合わせるが、案内ロボットが一時停止し来館者に注意を促すことで安全にすれ違うことができた。

(5)業務を終えた案内ロボットはエレベータで2階へ向かう。物流用ロボットは2階のオープンスペースで利用者に本を届けた後、エレベータホールへ移動。

(6)2階に到着したエレベータが開くと、案内ロボットが降車し、エレベータホールで待っていた物流用ロボットとぶつからないようすれ違った後、待機場所へ戻る。物流用ロボットはエレベータに乗り込み、6階の図書室へ戻る。

今後の展開
近い将来、より多くのサービスがロボット化され、施設・街区内に複数種類のロボットが導入されることが予想されます。本技術は、施設に合わせてロボット動作の設定を変える必要もなく、また、ロボット同士の連携に加え、ロボットを導入する際に一番の障害となっていた建物設備とも協調することができ、より複合的なサービスを提供します。今後は、課題をフィードバックしながら、連携技術の高度化を図り、多くの人に「利」のあるシステムとして、施設価値の向上に貢献します。